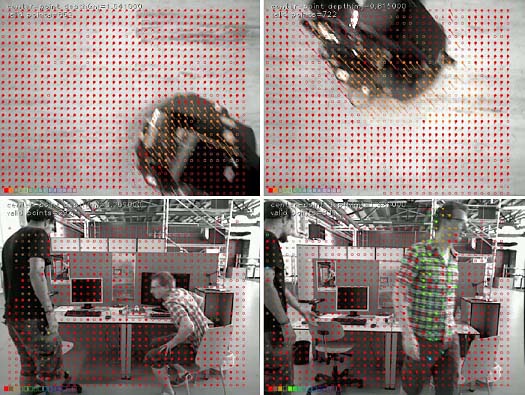
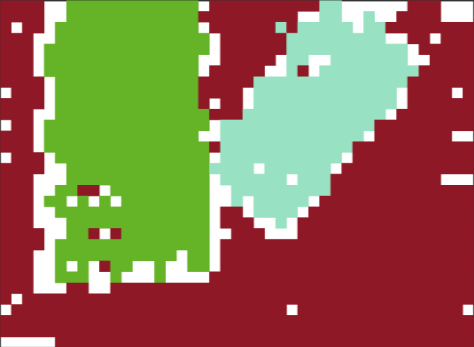
Abstract: In the paper, we propose a robust real-time visual odometry in dynamic environments via rigid-motion model updated by scene flow. The proposed algorithm consists of spatial motion segmentation and temporal motion tracking. The spatial segmentation first generates several mo...
Abstract: In this work, we propose an edge detection algorithm by estimating a lifetime of an event produced from dynamic vision sensor, also known as event camera. The event camera, unlike traditional CMOS camera, generates sparse event data at a pixel whose log-intensity changes. D...
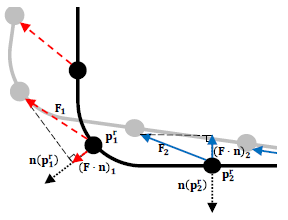
Abstract: This paper proposes an edge-based robust RGB-D visual odometry (VO) using 2-D edge divergence minimization. Our approach focuses on enabling the VO to operate in more general environments subject to low texture and changing brightness, by employing image edge regions and th...
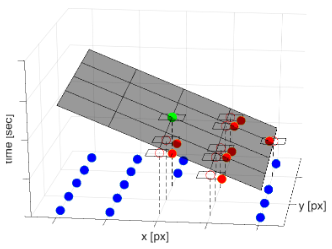
Abstract: In the paper, we propose a rigid motion segmentation algorithm with the grid-based optical flow. The algorithm selects several adjacent points among grid-based optical flows to estimate motion hypothesis based on a so-called entropy and generates motion hypotheses between two images, th...
Abstract: In the paper, we propose a robust visual odometry algorithm for dynamic environments via rigid motion segmentation using a grid-based optical flow. The algorithm first divides image frame by a fixed-size grid, then calculates the three-dimensional motion of grids for light ...
Abstract: In this paper, we propose a planar panorama stitching method to blend consecutive images captured by a multirotor equipped with a fish-eye camera. In addition, we suggest an exposure correction method to reduce the brightness difference between contiguous images, and a drift error corre...