The Particle Filter is a sequential Monte Carlo implementation of the Bayesian Filter. Unlike the Kalman Filter, it does not require linearity or Gaussian assumptions, making it suitable for highly nonlinear systems and non-Gaussian distributions. Instead of representing the belief with a mean...
The Kalman Filter is a specialized implementation of the Bayesian Filter. It is widely used in various engineering fields due to its optimality and computational efficiency when applied to linear systems with Gaussian noise. Below is a step-by-step mathematical derivation of its update equatio...
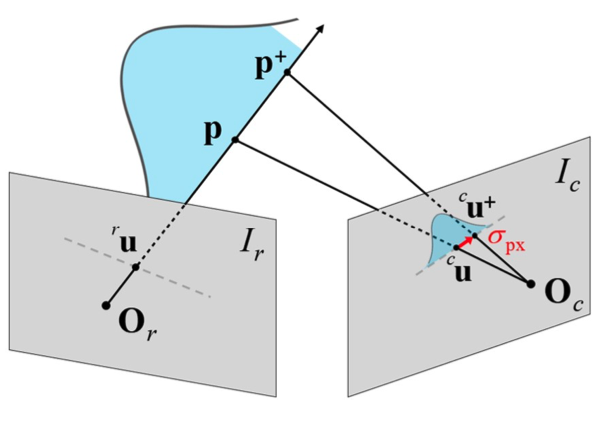
The depth filter is a useful component in monocular camera visual odometry systems, such as SVO (Semi-Direct Visual Odometry) 1 2. It is designed to estimate depth values from a sequence of images captured by a single camera. The filter operates under the assumption of Gaussian measurement noi...