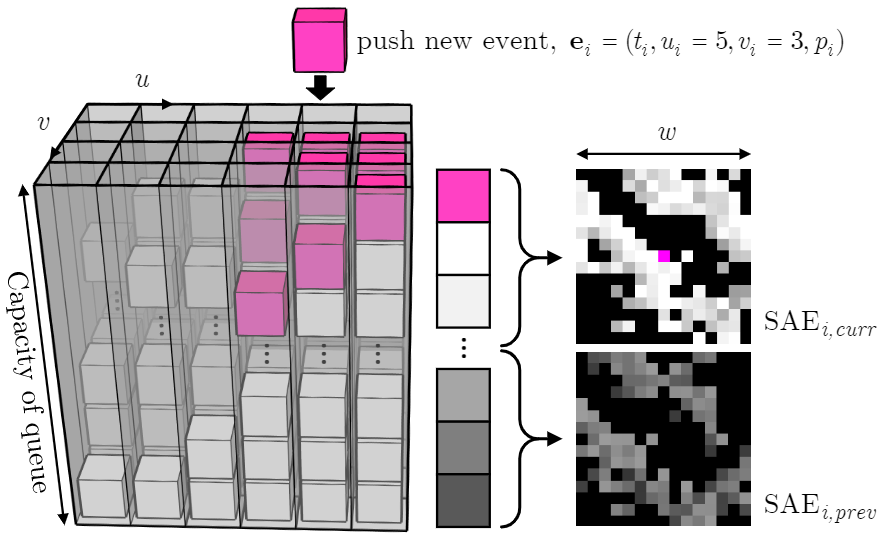
Abstract: Event cameras are bio-inspired sensors that capture intensity changes of pixels individually, and generate asynchronous and independent ``events’’. Due to the fundamental difference from the conventional cameras, most research on event cameras builds a global event frame by...
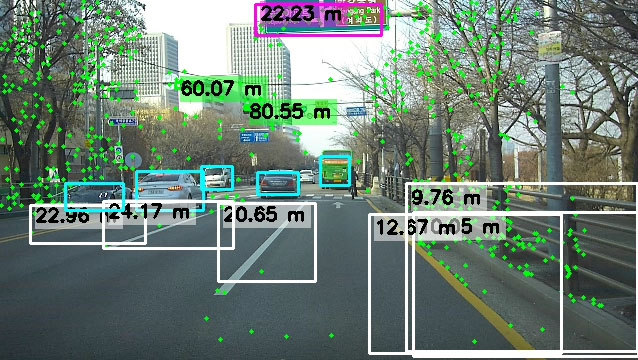
Abstract: This paper proposes the object depth estimation in real-time, using only a monocular camera in an onboard computer with a low-cost GPU. Our algorithm estimates scene depth from a sparse feature-based visual odometry algorithm and detects/tracks objects’ bounding box by util...
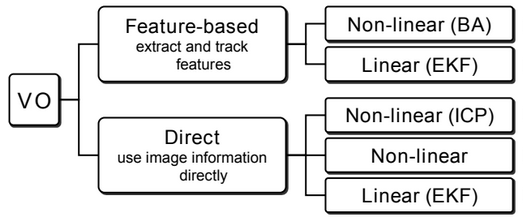
Abstract: This paper surveys visual odometry technology for unmanned systems. Visual odometry is one of the most important technologies to implement vision-based navigation; therefore, it is widely applied to unmanned systems in recent years. Visual odometry estimates a trajectory and a pose of t...