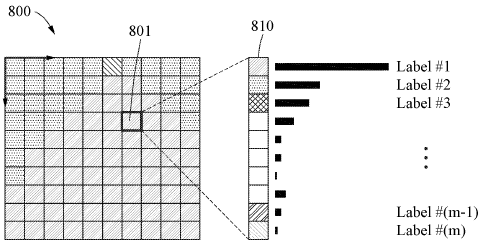
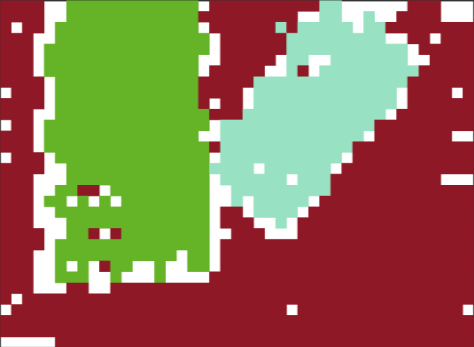
Abstract: Disclosed is an ego motion estimation method and apparatus, wherein the apparatus calculates a scene flow field from a plurality of spaces of an input image, clusters the plurality of spaces based on a scene flow, updates a probability vector map for clustered spaces, identifies a stati...
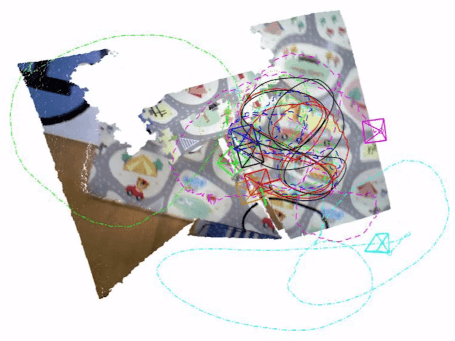
Abstract: In the paper, we propose a rigid motion segmentation algorithm with the grid-based optical flow. The algorithm selects several adjacent points among grid-based optical flows to estimate motion hypothesis based on a so-called entropy and generates motion hypotheses between two images, th...
Abstract: In the paper, we propose a robust visual odometry algorithm for dynamic environments via rigid motion segmentation using a grid-based optical flow. The algorithm first divides image frame by a fixed-size grid, then calculates the three-dimensional motion of grids for light ...