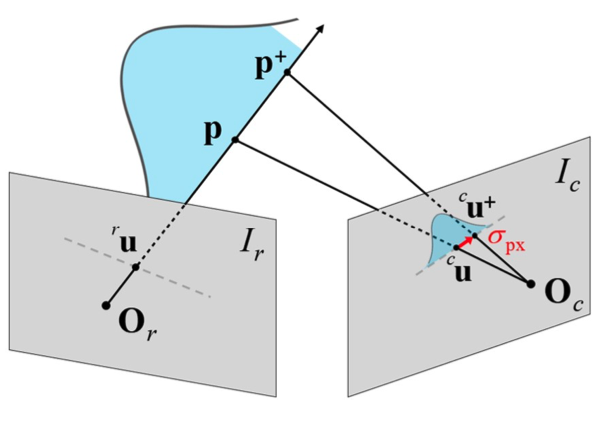
The depth filter is a useful component in monocular camera visual odometry systems, such as SVO (Semi-Direct Visual Odometry) 1 2. It is designed to estimate depth values from a sequence of images captured by a single camera. The filter operates under the assumption of Gaussian measurement noi...
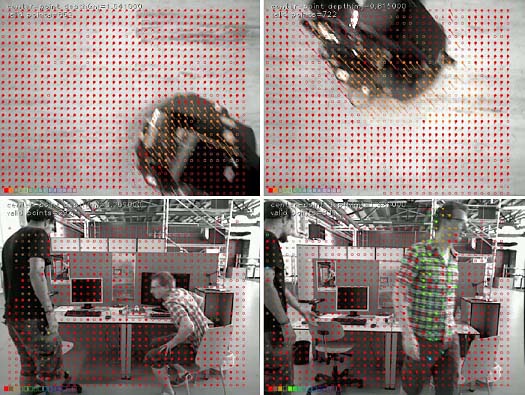
Abstract: In the paper, we propose a robust real-time visual odometry in dynamic environments via rigid-motion model updated by scene flow. The proposed algorithm consists of spatial motion segmentation and temporal motion tracking. The spatial segmentation first generates several mo...
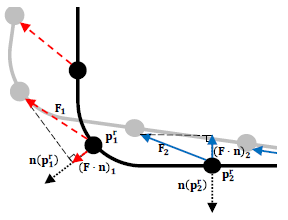
Abstract: This paper proposes an edge-based robust RGB-D visual odometry (VO) using 2-D edge divergence minimization. Our approach focuses on enabling the VO to operate in more general environments subject to low texture and changing brightness, by employing image edge regions and th...
Abstract: In the paper, we propose a robust visual odometry algorithm for dynamic environments via rigid motion segmentation using a grid-based optical flow. The algorithm first divides image frame by a fixed-size grid, then calculates the three-dimensional motion of grids for light ...
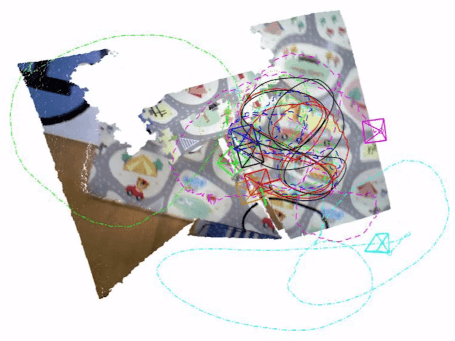
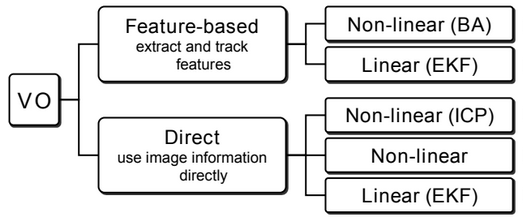
Abstract: This paper surveys visual odometry technology for unmanned systems. Visual odometry is one of the most important technologies to implement vision-based navigation; therefore, it is widely applied to unmanned systems in recent years. Visual odometry estimates a trajectory and a pose of t...