Image denoising is a fundamental task in computer vision, aiming to recover a clean image from a noisy observation. Total variation minimization, introduced by Rudin, Osher, and Fatemi (ROF), addresses this by penalizing the image gradient and data fidelity. This post explores the mathematical...
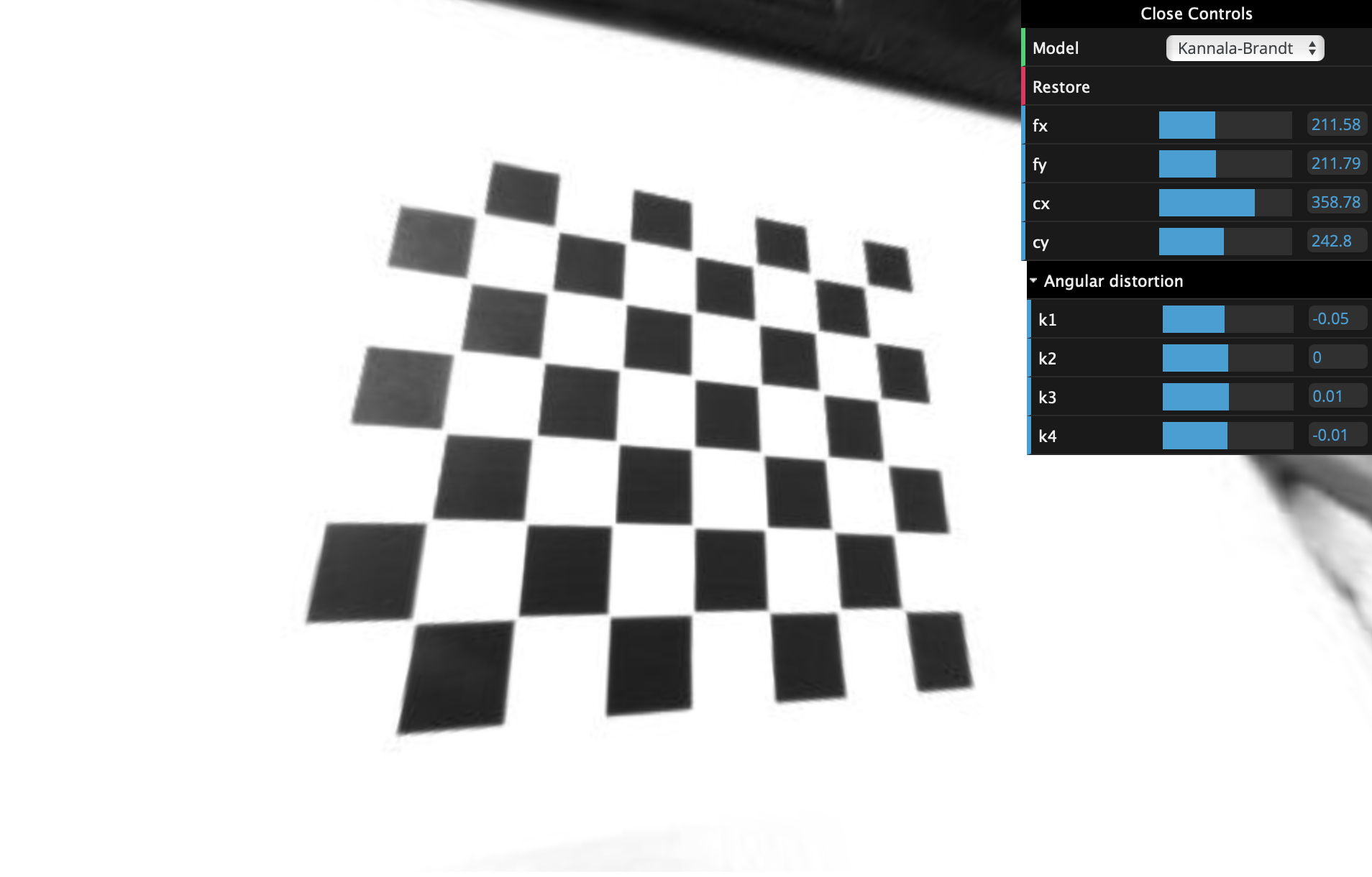
This post delves into the specifics of various camera models, exploring the mathematical and geometric concepts used to represent how a camera captures the world. However, when capturing world scenes through a camera, images suffer from distortions due to the physical properties of the lens. T...
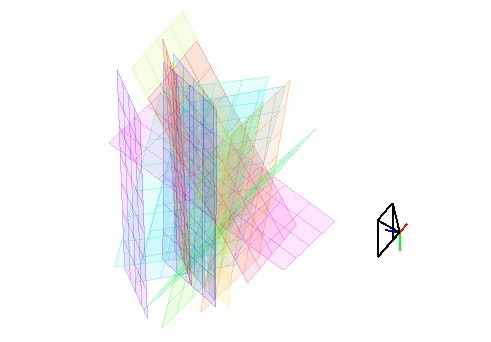
Camera calibration is a fundamental step in many computer vision applications, from 3D reconstruction to augmented reality. It involves estimating the intrinsic parameters of a camera (like focal length, principal point, and lens distortion) and its extrinsic parameters (rotation and translati...
This article introduces Spherical Harmonics (SH) and explains their mathematical foundation and applications. It covers how SH functions are used to represent data on spherical surfaces, particularly in computer graphics, including 3D Gaussian Splatting field. The interactive demo allows users...
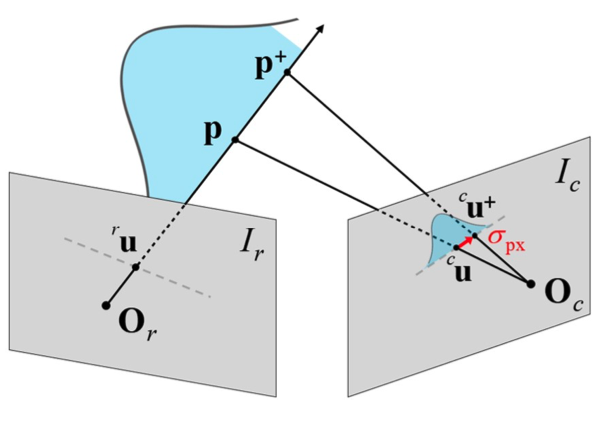
The depth filter is a useful component in monocular camera visual odometry systems, such as SVO (Semi-Direct Visual Odometry) 1 2. It is designed to estimate depth values from a sequence of images captured by a single camera. The filter operates under the assumption of Gaussian measurement noi...